Home
Research
Projects
Publications
Software
Teaching
Talks
Contact
Light
Dark
Automatic
Paper-Conference
Effects of priors on epistemic uncertainty in autoregressive active inference
Intelligent agents learn to solve tasks through interactions with their environment. We study autoregressive active inference agents …
Esther Van Pelt
,
Tim N. Nisslbeck
,
Harm J.W. Belt
,
Ruud J.G. Van Sloun
,
Wouter M. Kouw
PDF
Bayesian autoregression to optimize temporal Matérn-kernel Gaussian process hyperparameters
We present a probabilistic numerical procedure for optimizing Matérn-class temporal Gaussian processes with respect to the kernel covariance function’s hyperparameters based on Bayesian autoregression.
Wouter M. Kouw
PDF
Cite
Code
Message passing-based inference in an autoregressive active inference agent
We present the design of an autoregressive active inference agent in the form of message passing on a factor graph.
Wouter M. Kouw
,
Tim Nisslbeck
,
Wouter Nuijten
PDF
Cite
Code
Project
Spike-timing dependent plasticity for Bernoulli message passing
We bridge the mathematical and the spike-based perspectives on brain functioning by designing spiking neural networks that simulate Bayesian inference through message passing for Bernoulli messages.
Sepideh Adamiat
,
Wouter M. Kouw
,
Bert De Vries
PDF
Cite
Project
Online Bayesian system identification in multivariate autoregressive models via message passing
We propose a recursive Bayesian estimation procedure for multivariate autoregressive models with exogenous inputs based on message passing in a factor graph
Tim Nisslbeck
,
Wouter M. Kouw
PDF
Cite
Code
Project
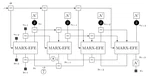
Coupled autoregressive active inference agents for control of multi-joint dynamical systems
We propose an active inference agent, consisting of multiple scalar autoregressive model-based agents coupled by virtue of sharing memories, to learn and control a mechanical system with multiple bodies connected by joints.
Tim Nisslbeck
,
Wouter M. Kouw
PDF
Cite
Code
Project
DOI
Message passing-based Bayesian control of a cart-pole system
We describe a Bayesian controller for a cart-pole system, where the entire computational process consists of online Bayesian inference executed by message passing in factor graphs.
Sepideh Adamiat
,
Wouter M. Kouw
,
Bart Van Erp
,
Bert De Vries
Cite
Code
Project
DOI
Planning to avoid ambiguous states through Gaussian approximations to non-linear sensors in active inference agents
For expected free energy minimization, we show that Gaussian approximations that are sensitive to the curvature of the measurement function, such as a second-order Taylor approximation, produce a state-dependent ambiguity term. This induces a preference over states, based on how accurately the state can be inferred from the observation.
Wouter M. Kouw
PDF
Cite
Code
Project
DOI
Bayesian grey-box identification of convection effects in heat transfer dynamics
We propose a computational procedure for identifying convection in heat transfer dynamics of motion control systems, using a Gaussian Process Latent Force Model.
Wouter M. Kouw
,
Caspar Gruijthuijsen
,
Lennart Blanken
,
Enzo Evers
,
Timothy Rogers
PDF
Cite
Code
DOI
Message-passing-based system identification for NARMAX models
We present a Bayesian identification procedure for polynomial NARMAX models based on message passing on a factor graph.
Albert Podusenko
,
Semih Akbayrak
,
Ismail Senoz
,
Maarten Schoukens
,
Wouter M. Kouw
PDF
Cite
Code
DOI
»
Cite
×