Abstract
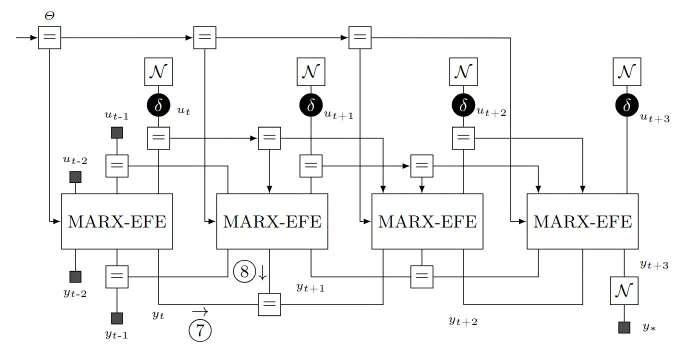
We present the design of an autoregressive active inference agent in the form of message passing on a factor graph. Expected free energy is derived and distributed across a planning graph. The proposed agent is validated on a robot navigation task, demonstrating exploration and exploitation in a continuous-valued observation space with bounded continuous-valued actions. Compared to a classical controller, the agent modulates action based on predictive uncertainty, arriving later but with a better model of the robot’s dynamics.
Type
Publication
International Workshop on Active Inference