Information-seeking polynomial NARX model-predictive control through expected free energy minimization
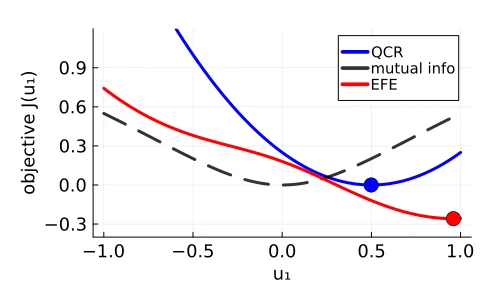 Control objectives with and without information-seeking.
Control objectives with and without information-seeking.
Abstract
We propose an adaptive model-predictive controller that balances driving the system to a goal state and seeking system observations that are informative with respect to the parameters of a nonlinear autoregressive exogenous model. The controller’s objective function is derived from an expected free energy functional and contains information-theoretic terms expressing uncertainty over model parameters and output predictions. Experiments illustrate how parameter uncertainty affects the control objective and evaluate the proposed controller for a pendulum swing-up task.
Type
Publication
IEEE Control Systems Letters